How Atlas Stays Upright: It Predicts Its Own Future, Hundreds of Times a Second
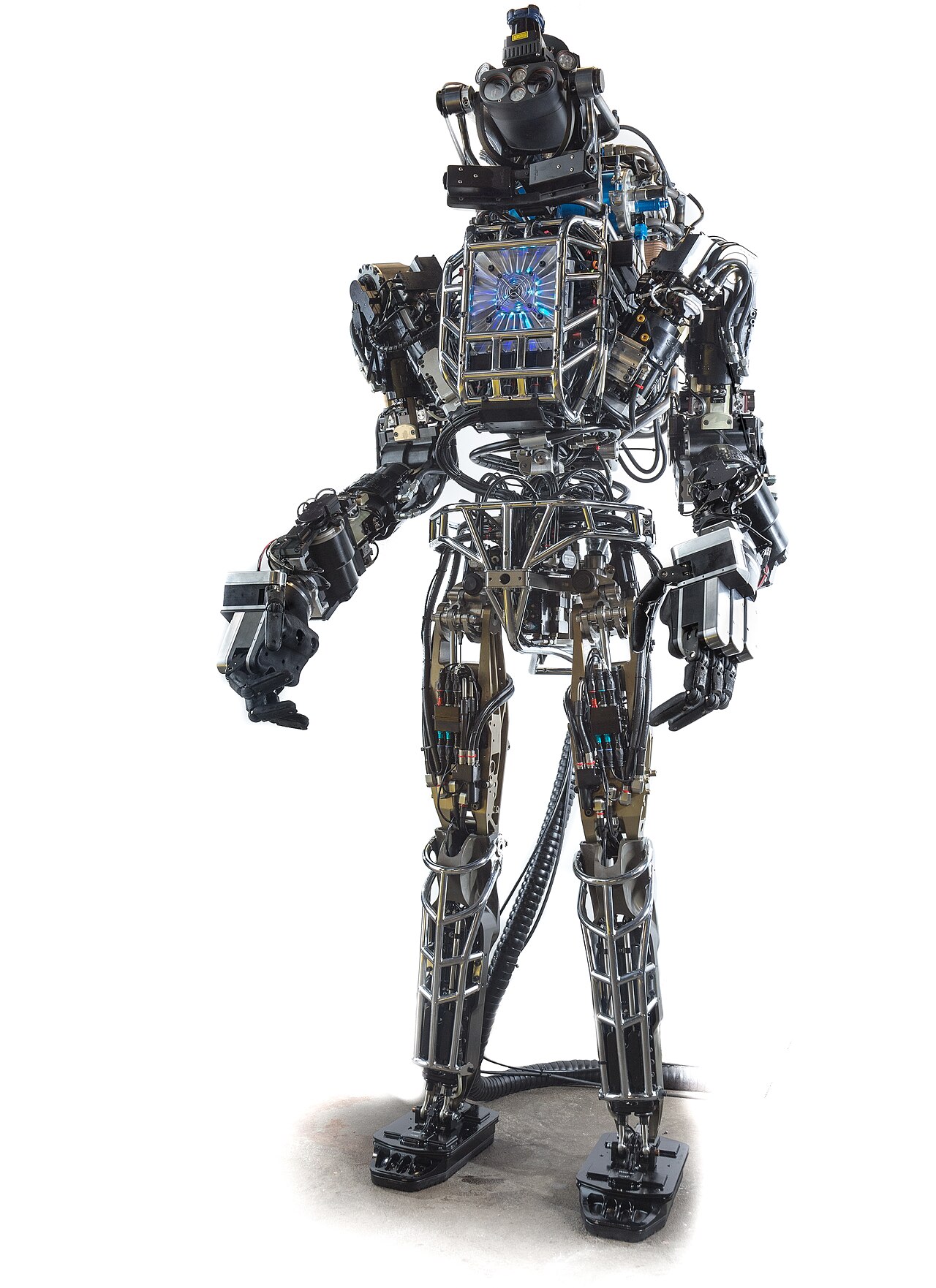
Watch a Boston Dynamics Atlas robot do a backflip, jog over uneven ground, or catch a shove and stagger back upright, and the first thing you feel is something close to unease. It moves like a thing that wants to stay standing. But there's no want in there, and no secret gyroscope doing the work. What keeps Atlas on its feet is stranger and more beautiful than that: hundreds of times every second, the robot stops, imagines its own near future, and acts to avoid the version of that future where it falls down.
Standing up is a constant near-miss
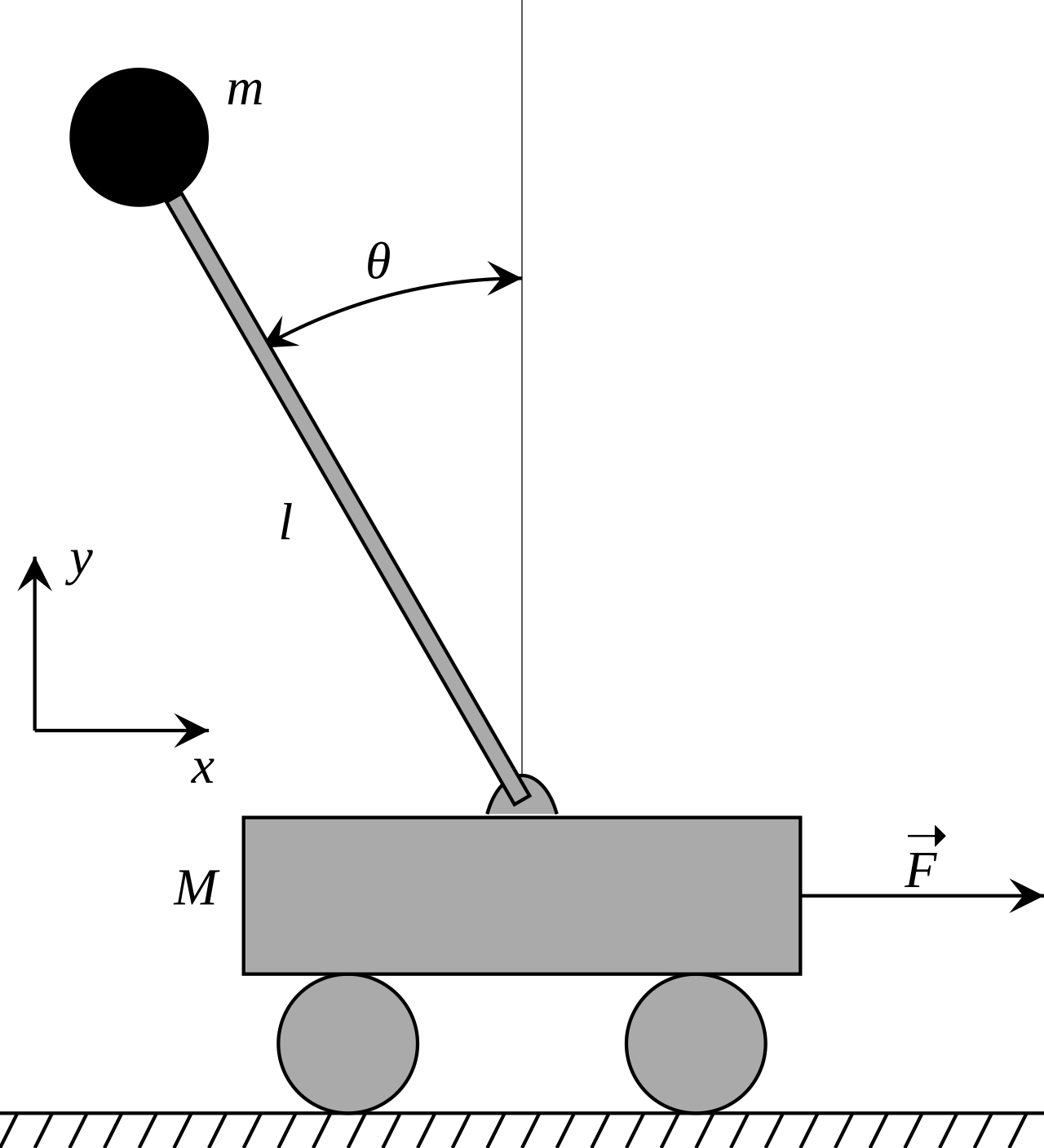
Here's the uncomfortable truth about being tall and bipedal: it's inherently unstable. A standing human — or a standing robot — is basically a tower of mass balanced on two small contact patches, with the heavy bits up high. Engineers model this with a deceptively simple object called the inverted pendulum: a weight on a stick, hinged at the bottom, that wants nothing more than to topple over.
A normal pendulum hangs and settles. An inverted one is the opposite — perched above its pivot, it will fall the instant you stop correcting it. You already know this in your own body. Stand still and you're never truly still; you're swaying in tiny circles, your ankles and hips firing constant micro-corrections you never notice. Balance isn't a state you reach. It's a fall you keep interrupting.
The robot that lives a few milliseconds in the future
Atlas's answer to that endless fall is a control technique called Model Predictive Control, or MPC. The name sounds dry; the idea is wild. At its heart, Atlas carries a model of itself — a piece of physics math that knows roughly how its body will respond to any action. And it runs that model forward in time.
Boston Dynamics describes it plainly: the controller "uses a description of how the robot's actions will affect its state to predict how the robot's state will evolve over a short period of time." In other words, before Atlas moves a joint, it asks: if I apply these forces now, where will my body be a handful of milliseconds from now? Then it searches across many possible actions, picks the one that best keeps it balanced and on-task, executes a sliver of it — and immediately throws the plan away to compute a fresh one. Predict, act, discard. Predict, act, discard. Hundreds of times a second.
It is, quite literally, a machine that survives by continuously hallucinating its own immediate future and steering away from the bad ones.
It thinks with its whole body at once
The early, parkour-and-dancing version of Atlas kept its model simple, tracking mostly its total center of mass. The newer electric Atlas thinks far bigger. According to Boston Dynamics, its model now reasons about "the motion of every joint in the robot, the momentum of every link in the robot, and the forces the robot applies on an object."
That phrase — whole-body control — is the quiet superpower. Atlas doesn't treat its arms, legs, and torso as separate departments. It treats them as one coordinated system sharing a single goal. So when something goes wrong, every limb is fair game for the fix. A human reaches out a flailing arm to keep from falling on ice; Atlas does the same math, on purpose, fluidly, swinging an arm or shifting its torso to redistribute momentum and buy back its balance. In one Boston Dynamics simulation, Atlas balances on a single foot while getting struck by a ball at 20 meters per second — about 45 mph — and actually uses the inertia of the pole it's carrying to help recover its balance, turning the load it's holding into part of the save.

Feeling the floor it can't see
A prediction is only as good as the sense data feeding it — and this is where Atlas gets genuinely uncanny. Its model of "where am I right now?" is stitched together from several streams of feedback running in tight loops. An inertial measurement unit (a package of accelerometers and gyroscopes) reports which way is up and how the body is accelerating, the same organ-of-balance role your inner ear plays. Joint encoders report the precise angle of every limb. And force sensors let it feel the push of the ground against its feet — pressure, weight distribution, the exact moment of contact.
Those signals are noisy and sometimes contradictory, so Atlas fuses them with filters (the workhorse is the Kalman filter) into one clean, best-guess estimate of its true state. That fused picture is what gets fed into the predictive model, loop after loop. The control loops run on the order of sub-milliseconds, which is how the robot can adjust joint torques fast enough to catch a stumble that would have a human face-down before they'd consciously registered the slip.
Why I love this one
There's a tidy little philosophical knot hiding in here. We tend to imagine balance as a fixed thing — you have it or you don't. Atlas shows it's nothing of the sort. It's a verb, not a noun: a relentless, high-speed argument between physics and intention, won fresh hundreds of times every second.
And the deepest part is how human it turns out to be. You don't stand upright because you're stable. You stand upright because some ancient circuit in your brainstem is also predicting your near future and quietly catching every fall before it starts — you just never get the memo. Atlas does the same trick out loud, in math, on a steel skeleton. The next time you stand up from your chair without a single thought, remember: you, too, are a tower of mass that should be falling, narrowly and continuously talking yourself out of it.